 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuper-Resolved Canopy Height Mapping from Sentinel-2 Time Series Using LiDAR HD Reference Data across Metropolitan France
Dec 12, 2025Fine-scale forest monitoring is essential for understanding canopy structure and its dynamics, which are key indicators of carbon stocks, biodiversity, and forest health. Deep learning is particularly effective for this task, as it integrates spectral, temporal, and spatial signals that jointly reflect the canopy structure. To address this need, we introduce THREASURE-Net, a novel end-to-end framework for Tree Height Regression And Super-Resolution. The model is trained on Sentinel-2 time series using reference height metrics derived from LiDAR HD data at multiple spatial resolutions over Metropolitan France to produce annual height maps. We evaluate three model variants, producing tree-height predictions at 2.5 m, 5 m, and 10 m resolution. THREASURE-Net does not rely on any pretrained model nor on reference very high resolution optical imagery to train its super-resolution module; instead, it learns solely from LiDAR-derived height information. Our approach outperforms existing state-of-the-art methods based on Sentinel data and is competitive with methods based on very high resolution imagery. It can be deployed to generate high-precision annual canopy-height maps, achieving mean absolute errors of 2.62 m, 2.72 m, and 2.88 m at 2.5 m, 5 m, and 10 m resolution, respectively. These results highlight the potential of THREASURE-Net for scalable and cost-effective structural monitoring of temperate forests using only freely available satellite data. The source code for THREASURE-Net is available at: https://github.com/Global-Earth-Observation/threasure-net.
Multi-Layer Modeling of Dense Vegetation from Aerial LiDAR Scans
Apr 25, 2022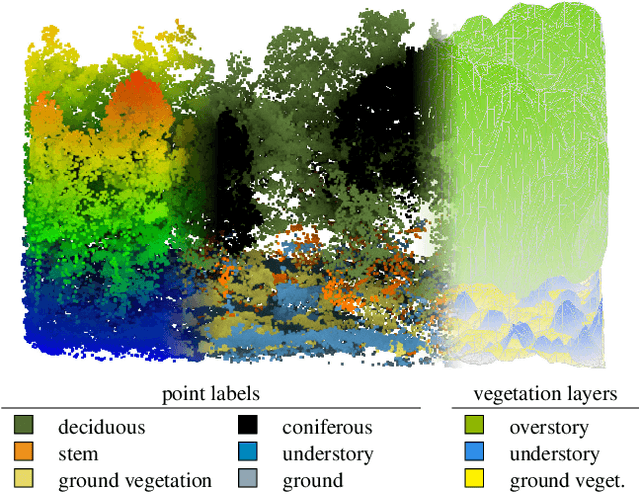

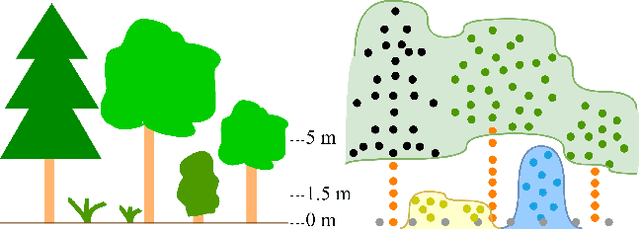
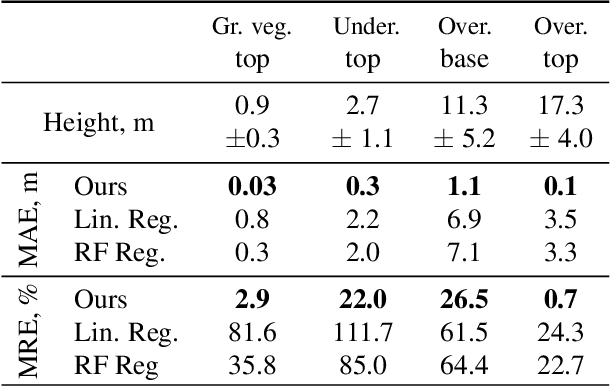
The analysis of the multi-layer structure of wild forests is an important challenge of automated large-scale forestry. While modern aerial LiDARs offer geometric information across all vegetation layers, most datasets and methods focus only on the segmentation and reconstruction of the top of canopy. We release WildForest3D, which consists of 29 study plots and over 2000 individual trees across 47 000m2 with dense 3D annotation, along with occupancy and height maps for 3 vegetation layers: ground vegetation, understory, and overstory. We propose a 3D deep network architecture predicting for the first time both 3D point-wise labels and high-resolution layer occupancy rasters simultaneously. This allows us to produce a precise estimation of the thickness of each vegetation layer as well as the corresponding watertight meshes, therefore meeting most forestry purposes. Both the dataset and the model are released in open access: https://github.com/ekalinicheva/multi_layer_vegetation.
Predicting Vegetation Stratum Occupancy from Airborne LiDAR Data with Deep Learning
Jan 20, 2022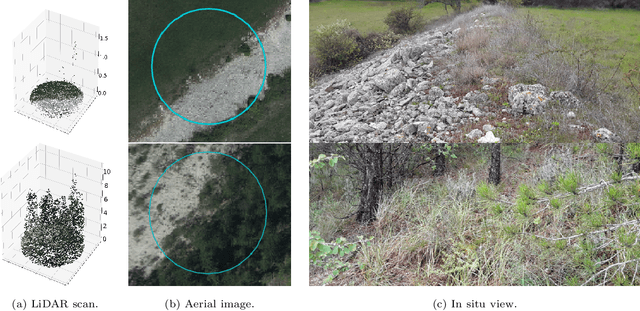
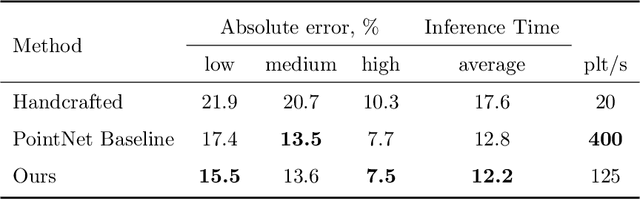
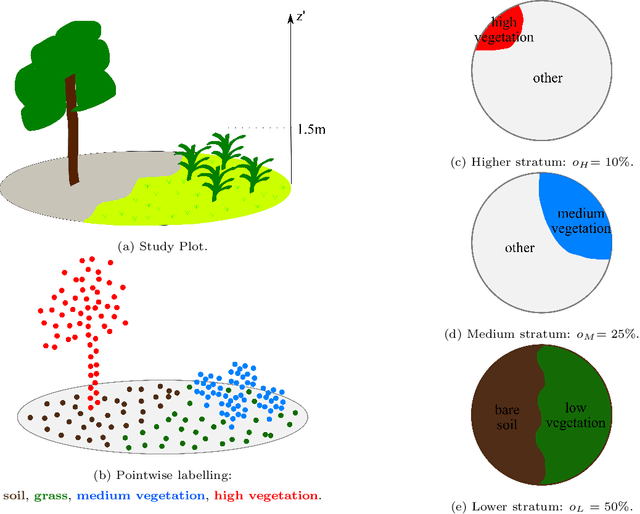
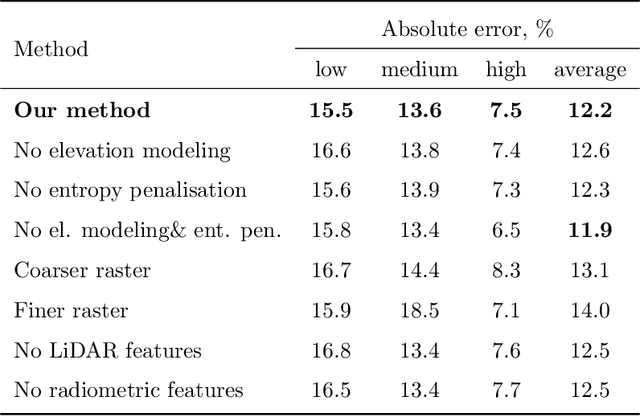
We propose a new deep learning-based method for estimating the occupancy of vegetation strata from airborne 3D LiDAR point clouds. Our model predicts rasterized occupancy maps for three vegetation strata corresponding to lower, medium, and higher cover. Our weakly-supervised training scheme allows our network to only be supervised with vegetation occupancy values aggregated over cylindrical plots containing thousands of points. Such ground truth is easier to produce than pixel-wise or point-wise annotations. Our method outperforms handcrafted and deep learning baselines in terms of precision by up to 30%, while simultaneously providing visual and interpretable predictions. We provide an open-source implementation along with a dataset of 199 agricultural plots to train and evaluate weakly supervised occupancy regression algorithms.
Vegetation Stratum Occupancy Prediction from Airborne LiDAR 3D Point Clouds
Dec 27, 2021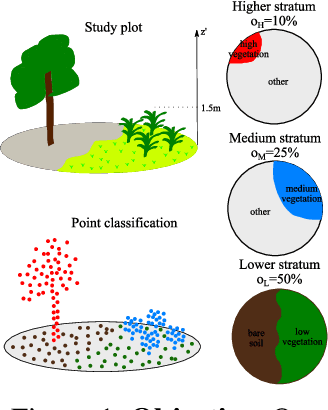
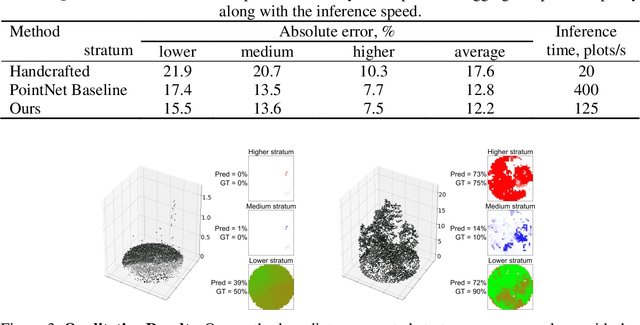
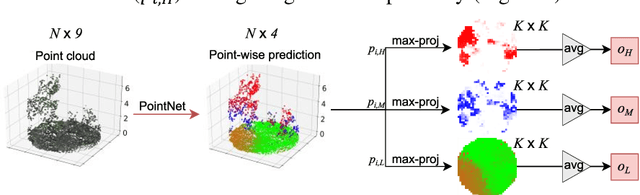
We propose a new deep learning-based method for estimating the occupancy of vegetation strata from 3D point clouds captured from an aerial platform. Our model predicts rasterized occupancy maps for three vegetation strata: lower, medium, and higher strata. Our training scheme allows our network to only being supervized with values aggregated over cylindrical plots, which are easier to produce than pixel-wise or point-wise annotations. Our method outperforms handcrafted and deep learning baselines in terms of precision while simultaneously providing visual and interpretable predictions. We provide an open-source implementation of our method along along a dataset of 199 agricultural plots to train and evaluate occupancy regression algorithms.